Introduction
In the embedded world, the use of a Real Time Operating System (RTOS) is commonplace, and with the advent of the Internet of Things (IoT) they are becoming more so. You might be deciding to use an RTOS for the first time, or perhaps you are thinking of moving to a new RTOS. This is the fourth article in our series on RTOSes to help you to get started.
The previous article explained the concept of pre-emption, why an RTOS differs from a general OS in this matter and the reasons for doing so. It asked “when and why can a task not pre-empt another?” and concluded that there were three reasons.
- Lack of pre-emption support
- Interrupts being disabled (for long periods)
- Locks and issues like priority inversion
This article will deal with the third reason, namely priority inversion and its solution, priority inheritance.
We mentioned earlier that being fully pre-emptible can introduce certain problems.
Priority Inversion
The diagram below demonstrates an issue called priority inversion.
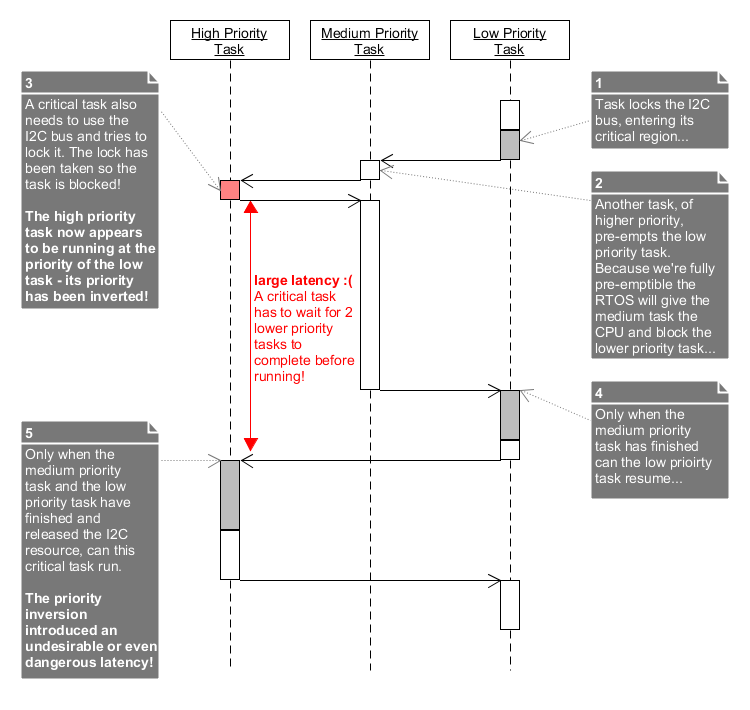
In the above diagram we see that a low priority task has locked the I2C bus. This is an unlucky but very possible scenario. Whilst it is in the critical region it is pre-empted by a medium priority task. In the meantime another critical task also wants to use the I2C bus, but is prevented from doing so because the bus is locked. This means that the critical task is blocked waiting until the lock becomes available. However, once it blocks, the low priority task cannot run because the medium priority task will be given the CPU based on its priority.
Thus, the low priority task must wait until the medium priority task completes before it can run and release the I2C bus. In this situation the critical task is running as-if it had the priority of the low-priority task: its priority has been inverted! We call this unbounded priority inversion because the low priority task could potentially be stopped indefinitely waiting on however many medium priority tasks are running in the system. In this example we only had one medium priority task, but if we had more, the inversion time could increase almost indefinitely!
This is a problem that only an RTOS faces. Remember, your desktop OS is probably more concerned with throughput than it is with real time responsiveness, so whilst it will support some pre-emption, it might, for example, not allow tasks holding locks to be pre-empted, therefore avoiding this kind of scenario. However, an RTOS has to be as responsive as possible, so the kind of latency we saw introduced above is unacceptable. How do we get around this?
Priority Inheritance
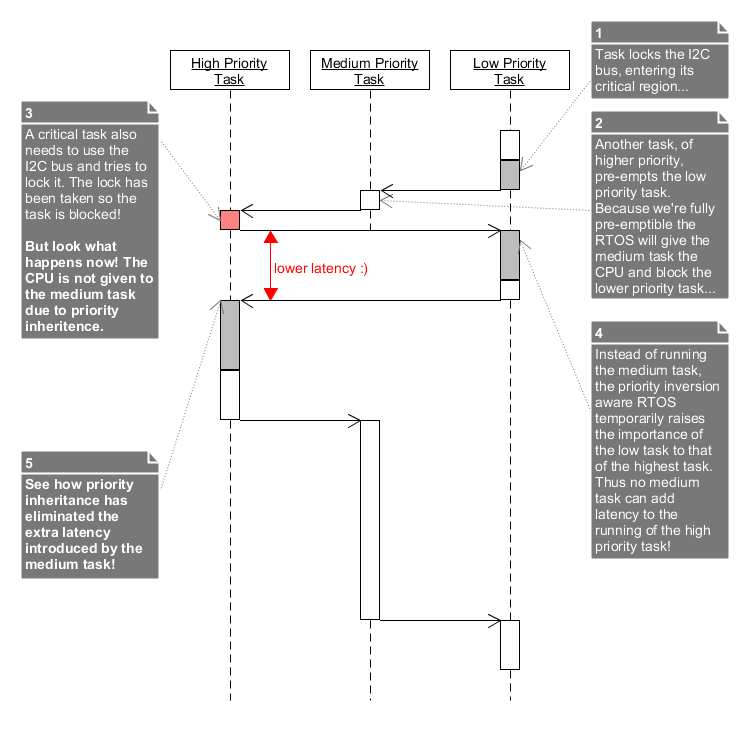
The answer comes from something called priority inheritance. When a higher priority task is blocked by a lower priority task, the RTOS temporarily raises the priority of the low task until the critical task can unblock. At this point the priority of the low task is restored and the critical task is scheduled.
You might notice that there is still some latency. It’s not as much as before, but it’s still there. We refer to this as bounded priority inversion. It is, unfortunately, unavoidable, but the basic priority inheritance scheme shown above minimises it to as little as possible. It is then up to the system designer to make sure that the time tasks spend in their critical regions are as small as possible.
The trouble is that not only has the RTOS had to become more complicated in order to support priority inheritance, those who develop for RTOSes also have to be aware of such issues, so the technical burden is increased and part of the burden has to be borne by the developer, who may or may not be as expert as the RTOS provider.
In fact, even NASA can get it wrong, as was demonstrated by the infamous 1997 Mars Pathfinder problem [1], which was caused by exactly this kind of issue. So if anyone ever tells you priority inheritance isn’t rocket science, you’ll know better (cue laughter). The Pathfinder problem was explained as follows.
“The higher priority … task was blocked by the much lower priority ASI/MET task that was holding a shared resource. The ASI/MET task had acquired this resource and then been pre-empted by several of the medium priority tasks…” [2]
The example of increased latency in the previous article, caused by the interrupt masking, is also a type of priority inversion. It, however, cannot be solved using the above method.
So far this series has covered the “bread and butter” of real-time systems: the fundamental issues that they help solve. However, the scheduler isn’t the only aspect of a good RTOS and the OS as a whole is not just the kernel but also the infrastructure supporting the user that sits on top of the kernel. The next article will discuss some other features that should be noted in an RTOS.
References
- M. Jones, 07 12 1997. [Online]. Available: http://research.microsoft.com/en-us/um/people/mbj/mars_pathfinder/authoritative_account.html.
- M. Mike Jones, "Real-World (Out of This World) Story," [Online]. Available: https://www.microsoft.com/en-us/research/people/mbj/.
Attributes
- Photo: "Mars Pathfinder Lander and Sojourner Rover" by Ryan Somma is licensed under CC BY-SA 2.0